
Sharjah 2018 Underwater Archaeology Survey
Alexandre Monteiro, Filipe Castro, Gonçalo Calado, José Pinto, Manuel Ribeiro, Paulo Costa, José Carita
Virtual visit to the 2020 Lisbon exhibit at Museu Nacional de Arqueologia
Introduction
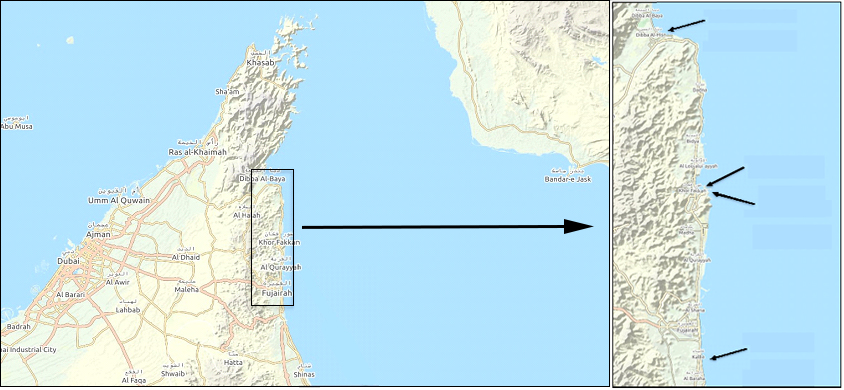
Upon solicitation of the Sharjah Archaeology Authority (SAA), the Instituto de Arqueologia e Paleociências of the Universidade Nova de Lisboa (IAP-NOVA) has conducted a multi-disciplinary partial reconnaissance survey of three marine areas in the Sharjah Emirate, UAE – Kalba, Khorfakkan and Dibba Al Hisn.
In what was to be the first time ever that the Nautical component of the Portuguese Archaeological mission to Sharjah was deployed on the Emirate, this survey was conducted between the 21st and the 29th November 2018.
During that period, a team of Portuguese archaeologists, engineers from Oporto University and a SAA archaeologist used two Autonomous Underwater Vehicles (AUV) and two Unmanned Aerial Vehicles (UAV) to investigate the seabed and the underwater cultural heritage (UCH) potential of those areas, with data being gathered by a combination of geophysical and dive surveys.
In this preliminary report we describe the technologies as well as the operational procedures and results from this survey:
This project was carried out by nautical archaeologists and divers Alexandre Monteiro and Filipe Castro; the maritime biologist and master diver Gonçalo Calado, nautical historian and technical diver Paulo Costa, the underwater robotic engineers José Pinto and Manuel Ribeiro, expedition leader and historian Rui Carita, Sharjah’s archaeologist Eisa Yousif, Kamyar Kamyab and officers from the Sharjah Police Rescue Team.
We are forever grateful to the professionalism of the Sharjah Police team led by Major Faisal Jassim Al Doukhi: sargeants Saeed Awad, Anas Mahrous Zaidan and Mohammed Khamis Al Tiniji, the cooperant Shazad Sohail and policeman Abdul Majid Mohammed.
Diving Operations
The archaeological survey was performed by a four-element dive team, divided into two binomials of two divers, which, following the research proposal previously presented, remained in a state of permanent readiness, in order to:
- visually inspect possible targets detected by AUVs by diving on it, where and when the diving conditions did not present considerable risks;
- proceed to record images (video and/or photograph) of said targets, whenever possible;
- ensure the safety and recovery of the AUVs in case of their unexpected entanglement with obstacles in the seabed or on the water column (fishing nets, lines, fish-traps, )

Thus, the main objective of the dive team was to carry out a rapid and immediate visual check of the anomalies detected by the survey, to determine which targets would merit further archaeological intervention and to discard those that revealed to be mere geological irregularities or had no archaeological value.

Unless an exceptional high valued target was detected, the dive team was not expected to undertake in this mission archaeological excavations or any type of elaborated archaeological intervention.
Dive Team
The dive team was composed by the researchers mentioned previously in the Introduction section, all of them scuba diving certified by recognized international training agencies long before the date of the mission.
In addition to their academic qualifications – one nautical archaeologist, one anthropologist, one historian and one marine biologist – some of the divers also have advanced technical diving training and one is a certified instructor. Between all of them, they have more than 4.000 dives.
While not diving, the dive team also took part in AUVs and equipment handling, both on board and to and from the harbour.

Figure 3: Divers Paulo Costa, Filipe Castro and Alexandre Monteiro prepare to descend on a target off Dibba.
Choice of Individual Diving Equipment and Gas
The individual diving equipment, kit configuration and choice of gas were decided previously to the mission, upon study of the Nautical Charts for the areas where the survey would take place.
The areas to be surveyed presented a bottom depth of less than -30 meters, so, it was not expected that the dive team would be exposed to nitrogen narcosis or oxygen toxicity at a partial pressure of over 4 ATM. With this in mind, Air (21% O2 / 79% N2) was the gas consumed during all dives.
Divers used their own personal equipment, all being autonomous open circuit systems. For thermal protection, and, again, after considering the conditions for the sites where the mission would take place, all divers opted for wet suits.
Management of diving time and gas consumption were individually monitored by personal computers and individual gauges. All divers used redundant equipment, integrating a second regulator.
Detailed description of BCDs, harnesses, lights, cutting tools, spools, buoys, etc, used by the diving team is not considered relevant for the present report.

Diving Equipment
Common use diving equipment, consisting of weights of 1 and 2 kilos, respective weight-belts and scuba tanks (cylinders) was the only equipment obtained at the destination, all of this being provided by the Sharjah police. It was also Sharjah police that provided the tank fillings and transportation of equipment and individuals to the survey areas.
Tanks used by the dive team were CATALINA S80 and LUXFER S080, both in aluminum alloy, with 11.1 liters capacity and a working pressure of 207 BAR (3000 PSI). All tank valves were compatible with both DIN and YOKE regulator threads used by divers.
Diving Routine
The dive team followed closely the engineers operating the AUVs, sharing the very same daily schedule and routines, ready to perform the task described before.
Survey operations started daily at about 07:30/08:00 am with a break for lunch – back at the hotel – between 12:00 am and 2:00 pm. Twice, this lunch break was performed outside, once at sea and then at Dibba harbour.

The daily end of operations was conditioned by the lack of daylight, as sunset was rather sudden and took place about 5:00 pm.
For safety reasons it was decided to complete docking manoeuvres before sundown. Only once did the team arrived at home harbour after dark, this upon the Dibba survey trip and only after operations were delayed due to the entanglement of an AUV on a fishing net.

All the members of the team would be back at the hotel by 7:00 pm for equipment checks, batteries recharge and eventual maintenance and upkeep of equipment.
After that a debriefing took place and data was acutely reviewed.
Pending on the data acquired by the AUVs, the next day was planned, articulating the need for target visual inspections by the dive team with the survey and the mapping of new area. This task was greatly facilitated since two vessels were permanently available.
Choice of Targets to Inspect
In order to make the fullest use of the daily period available for the mission, it was decided that divers would check any suspect anomaly at once, providing that the dive would be carried out in safe conditions and would be terminated still during daylight.
As it was possible to keep up with the survey in real time and the engineers could also process the data on board, most of the dives took place immediately after the AUV operators had processed data from the survey.
Dive # | Day (Nov.) | Area | Spot | Time Down | Time Up | Dive Time | Max Dept | Average Depth |
1 | 22 | Khor Fakkan | Shark Island South | 11,40 h | 12,15 h | 35’ | 11 m | 8 m |
|
2 |
22 |
Khor Fakkan | Shark Island West | 15,49 h | 16,30 h aprox. | 4 m |
3 m | |
| 3 | 24 | Khor Fakkan | Target 1 | 9,21 h | 9,40 h | 19’ | 24 m | 15 m |
| 4 | 24 | Khor Fakkan | Target 2 | 10,07 h | 10,33 h | 25’ | 12 m | 6 m |
| 5 | 24 | Khor Fakkan | Target 3 | 15,47 h | 16,24 h | 37’ | 13 m | 13 m |
| 6 | 25 | Khor Fakkan | Target 4 | 9,49 h | 10,04 h | 15’ | 27 m | 15 m |
| 7 | 25 | Khor Fakkan | Bay | 11,59 h | 12,24 h | 25’ | 9 m | 4 m |
| 8 | 25 | Khor Fakkan | Target 5 | 15,41 h | 15,56 h | 15’ | 22 m | 15 m |
| 9 | 25 | Khor Fakkan | Target 6 | 16,11 h | 16,24 h | 13’ | 18 m | 12 m |
| 10 | 25 | Khor Fakkan | Target 7 | 16,40 h | 16,53 h | 13’ | 12 m | 9 m |
| 11 | 27 | Dibba Al Hisn | Target 8 | 16,17 h | 16,43 h | 26’ | 24 m | 18 m |
| 12 | 28 | Khor Fakkan | Martini Rocks | 10,24 h | 11,03 h | 39’ | 14 m | 11 m |
Table 1: Total number of dives done for archaeological purpose
AUV Operations
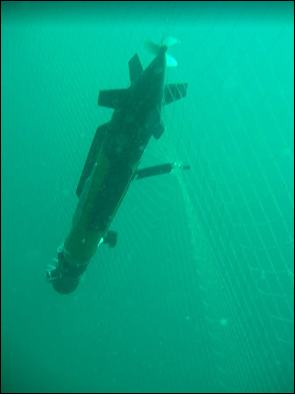
The Portuguese team used two LAUV autonomous submarines originally developed by the Porto University in Portugal and currently commercialized by their spin-off company, OceanScan MST.
AUV vehicles have been designed by the Laboratório de Sistemas e Tecnologia Subaquática from Porto University targeting easy operation with reduced logistic requirements. As such, these vehicles can be hand-carried by one or two people and operated using just one laptop and one communication gateway, being possible to launch and recover the AUVs from shore or small vessels.

LAUVs are very modular in that it is possible to mount on them a plethora of different sensors, both for localization and mapping. Despite their reduced size, the LAUVs used in this expedition carried a very capable localization system that fused information from GPS (when at surface), ground velocity measured by Doppler Velocity Log distance measurements from a forward-looking sonar and inertial measurements from two separate INS systems.
The two LAUVs used can travel at up to 2 m/s, being their nominal speed (speed at which they can travel longer distances) 1 m/s. All vehicle movements are controlled by their tail section, constituted by one propeller and 4 controllable fins.

For communication, the AUVs can use Wi-Fi when close to the control station or GSM if out of Wi- Fi range. When the vehicles go underwater, however, the radios stop being used for communication (as water is opaque to these radio frequencies), thus vehicles use an acoustic modem that can communicate with them, at distances of up to 4 km, by using ultrasound.
Even though the two vehicles used had similar moving and localization capabilities, they differed in respect to their payload (sensor packages) and battery endurance.
LAUV-NOPTILUS-1
The LAUV-Noptilus-1 (LNP1) AUV carries both one multi-beam and one side scan sonar from Imagenex. The Imagenex 837B “Delta T” multibeam sonar is bottom-mounted in LNP1 to acquire high-resolution bathymetry from the ocean bottom. This sonar operates at 260 KHz and measures up to 8400 distance points (beams) per second.
Moreover, LNP1 also carries the Imagenex 872 “Yellow Fin” side scan sonar which, using a single modulated sonar pulse (on each side), can measure the bottom reflectivity of up to 2000 points in the bottom. This sonar has 3 configurable frequencies: 260 KHz, 330 KHz and 800 KHz.
The swath width of the sonar is configurable from 10m to 200m with gradual degradation of its resolution. On this expedition the sonar was used either with 30m or 100m ranges for high and low frequencies, respectively.
LAUV-XTREME-2
The LAUV-Xtreme-2 (LXT2) AUV carried sides can sonar, a video camera and also a magnetometer making it a very versatile solution for underwater mapping.
The sidescan sonar on LXT2 is a Klein 3500 Dual Frequency side scan sonar. This sonar produces two different and concurrent output data streams: photo quality side scan imagery and high accuracy, co-registered Swath Bathymetry.
The Swath Bathymetry option allows for wide swath performance which is typically 10-12 times the overall altitude of the UUV and thereby significantly greater coverage than can be achieved by a multi-beam sonar. This sonar operates at 455 KHz and 900 KHz, being possible to use both simultaneously for bathymetry and side scanning.
The LXT2 also carried a bottom-looking video camera that can take still photographs of the bottom when close to it. The camera has a 5MPx resolution and can take up to 7 frames per second. To illuminate the bottom, LXT2 also carries 4 strobe LEDs which are synchronized with the camera.

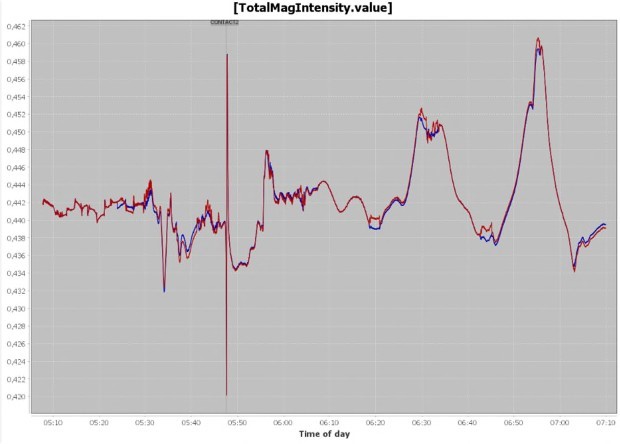
Finally, LXT2 uses a self-compensating magnetometer. Ocean Floor Geophysics (OFG) offers the only Self-Compensating Magnetometer (SCM) system that can operate with the sensor mounted in an Autonomous Underwater Vehicle (AUV) to acquire high resolution, high quality magnetic data that is automatically compensated and corrected to remove the effects of the vehicle on the magnetic data. The magnetometer can detect metal objects sunk below the surface, objects which could otherwise be not detected.

MANTA
The Manta Communications Gateway created a local wireless network of systems using Wi-Fi and acoustic modems (WiFi, GSM and Iridium comms / μModem/Evologics/SeaTrac Acoustic Modem), which allowed the two LAUV operators to control and monitor multiple vehicles in a networked environment over distinct platforms, including Android smartphones.
The Manta is battery powered for portability and can handle a full day of operations without recharging.
CONTROL STATIONS
All AUV operations were conducted from the boat provided by the Sharjah Archaeology Authority, in collaboration with the Sharjah Police. Aboard the boat, the Manta communications gateway was used to connect the operation console(s) with the AUVs using any available communication mean (Wi-Fi, GSM or Acoustic Modem).
The Wi-Fi antenna was mounted in the top of the boat in order to improve the communication range. The acoustic modem was deployed submerged from the side of the boat.
To control the AUVs, either a laptop or a mobile phone was used to run the Neptus Software.1 Mobile phone consoles were used to quickly verify the status of the vehicles, start and stop previously loaded plans and also to tele-operate the AUVs.
All acquired data was geo-located onboard the vehicles using the WGS84 geodetic system. The data was then exported to other GIS systems (Google Earth or ArcGIS).

AUV/UAV operations comprised the following phases:
- AUV and UAV validation survey. This phase validated the operational state of all equipment upon arrival to the destination. 4 hours of operations in Khor Fakkan bay – an area with low currents and low ship traffic – was enough for these
- Bathymetry validation survey. In these surveys, the AUVs were deployed from the support boat and travelled close to the surface to measure distance to the bottom (using acoustic ranging sensors).
- Preliminary assessment of the operational areas. The goal of these assessments was to evaluate the operational areas in what regards currents, traffic, obstacles, and potential hazards.
- UAV flights over selected areas of operation. The goal was to map the area from the air to help identify targets and potentialhazards.
- AUV sidescan and magnetometer surveys. After validating the depth and ruggedness of the area, the vehicle was tasked with bottom-following surveys, where both magnetometer and side scan sonars were used to map the sea.
Calibrating and Testing
The first day of operations was dedicated to calibrate and test the AUVs as well as to scout the area of operations for potential dangers. The buoyancy of the AUVs was recalibrated in order to adapt to the change of salinity of the water. Moreover, the compasses of AUVs were calibrated using a circling behavior.
In the first day only 2 short surveys were conducted (one with each AUV) to test that the sensors were producing the expected results and validate the control station setup onboard the boat.
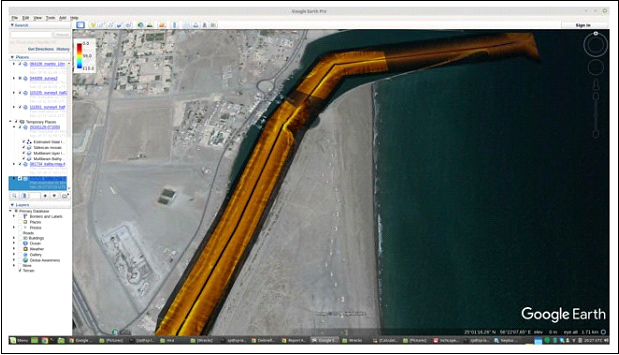
Khor Fakkan AUV Surveys
In Khor Fakkan, most of the surveys have been conducted using the LXT2 for increased resolution and safety.
It was possible to cover more than 4.5 km² in 4 days of operation (together with diving operations). For these surveys the AUV was travelling at 1 m/s with a constant altitude (relative to the bottom) of 7 meters and using 75 meters of side scan sonar range to each side.

The area that was covered differed from the one initially proposed so as to avoid surveying in dredged areas and also to extend the length of covered coast.
Due to the spike in interest resulting from finding archaeological artifacts on Shark Island, it was decided to also cover the coast around the island and to the south. In Khor Fakkan, two actual wrecks have been detected together with three false positives, all inspected by divers.

Also verified were the positions of “two interesting sonar targets” found in 2001 by the Norwegian mission that surveyed about 4.5 km2 of the Khorfakkan coast line – mainly its bay all along the 20- meter bathymetric line. 2 No anomalies were found there.
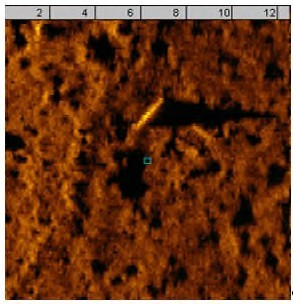
TARGETS OF INTEREST IN KHOR FAKKAN
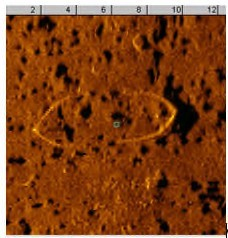
Tube-shaped object
Location: 25N21.3342, 56E22.8606
Depth: 17.7 m | Alt.: 7 m

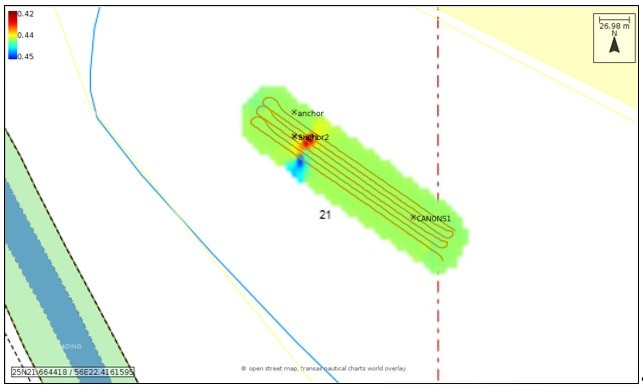
Ship-shape
Location: 25N21.599, 56E22.5087
Depth: 14.9m | Alt.: 7m
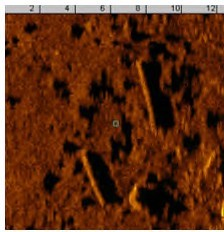
Tube-shaped objects
Location: 25N21.6355, 56E22.5157
Depth: 15.9m | Alt.: 7m
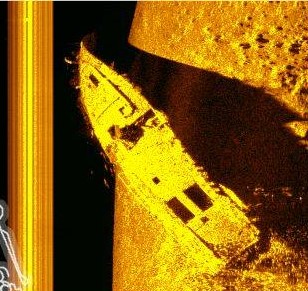
Shipwreck 1
Location: 25N21.6737, 56E22.4225
Depth: 15.1m | Alt.: 6.9m
An 8-meter-long service ship-to-shore boat from the late 19th / early 20th centuries, with an iron frame and the now missing wood boards.
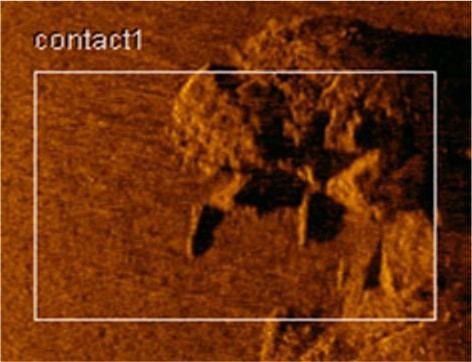
Contact 1
Location: 25N22.2305, 56E23.062
Depth: 27.7m | Alt.:7m
Discarded fishing traps and geological.
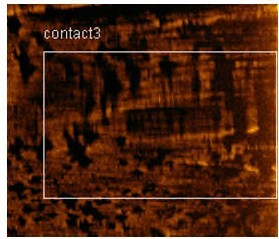
Contact 3
Location: 25N21.6808, 56E22.7207
Depth: 17.8m | Alt.: 7m
Geological.
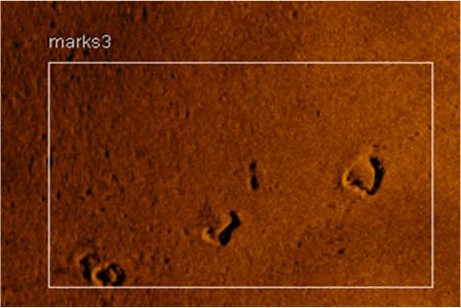
Marks 3
Location: 25N22.2432, 56E22.9568
Depth: 20.9m | Alt.: 7m
Discarded fishing traps.
Contact 1a
Location: 25N22.2432, 56E22.9568
Depth: 20.9m | Alt.: 7m
Geological.
Contact 2 – Sunken Tug
Location: 25N20.3262, 56E22.8732
Depth: 15.8 m – Alt.: 6.9 m
Wreckage of the Inchape2, a tug boat sunk as an artificial reef, Chellapermal, C.; Murphy, N.; Christensen, M.; Russel, K.; Atkinson, K.; Sockett, J.; Harris, C. & Schroder, T. (2014) UAE Diving. 4th edition. Dubai: Explorer Group Ltd.
Location: 25N20.3169, 56E22.8706
Depth: 15.8m | Alt.:5.0m


Khor KalbaA AUV Surveys
The Kalba area survey was a bit more problematic due to strong currents in the area, intense ship traffic, shallow waters and, being an estuary, variations in salinity. As such, we opted to conduct the survey at the surface and to follow the AUV operations with the boat by entering the estuary going through the deepest channel up and down. The mission was done at the peak of high tide to maximize the area covered by the sonars. Unfortunately, although data showed some contacts, nothing was considered relevant enough to warrant a dive.


Showing the dangers of LAUV operation in this region, in Kalba the vehicle stopped once its operation because it got entangled in a line (probably from a fishing net). We approached the AUV with the boat, disentangled the line and proceeded with the survey.
Total area covered in Kalba was 580.870m2.

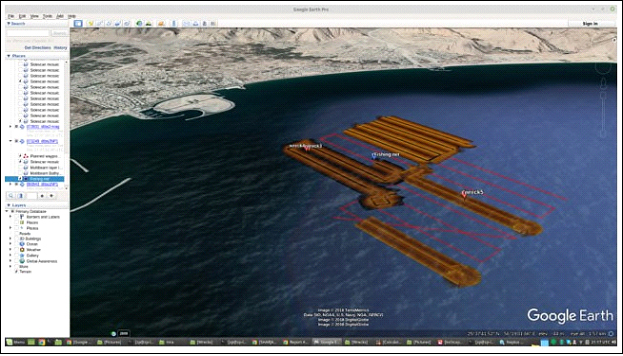
Dibba AUV Surveys
One day of operations was dedicated to Dibba Al Hisn, in the northeast of Sharjah. Since there was only one day reserved for that operation, we decided to do the survey with both AUVs simultaneously, in order to cover more ground.
Operations were cut short because of one of the AUVs got stuck on a “live” fish net, of which there were several in this area.
Using the acoustic modem, it was possible to pinpoint the location of the AUV. This allowed divers to locate the LAUV, cut it out of the net and recover it rather quickly.
Total area covered in Dibba Al Hisn was 1.993.805m2.


TARGETS OF INTEREST IN DIBBA AL HISN
Biology of Shipwrecks
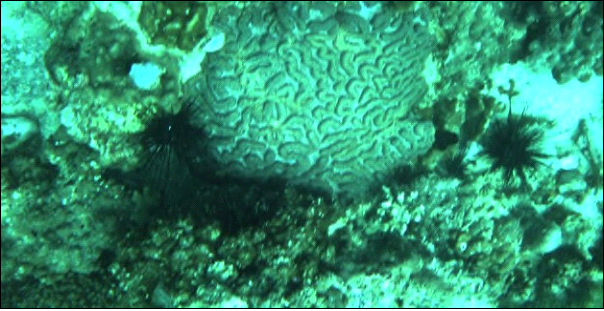
Especially on sandy and muddy bottoms, wrecks act as oasis in biodiversity. When a new hard substrate became available, millions of larvae from marine organisms will fix there, almost in a first come first served strategy. Suddenly, an ecological succession starts taking place, with early “pioneers” being replaced by other species, up to a dynamic stability biologist call “climax”.
Settled communities will depend on the amount of light (important for algae and shallow water corals), nutrients in the water column or a nearby source of larvae.

Fixed biological communities can also provide some clues on the dynamics of the seafloor near the wreck that could be interesting for archaeology. For example, reef-building organisms (corals, sponges, some calcareous algae or some polychaeta worms) can provide clues on whether the fixed structure was always in contact with the water column or, by contrast, if it was covered by sand of mud by a considerable period of time.
UAV Operations
UAV usage for archaeological purposes on the Sharjah Emirate has already been discussed elsewhere4 and its value, as an archaeological recording tool, was once more in evidence.
The system used in this mission was a DJI Mavic, which has a maximum speed of 65km/h, an endurance of 20 minutes and a camera of 1/2.3” (CMOS) | 4K (video) | 12MP (photo) | FOV 78.8° 26 mm. Moreover, the team used one DJI Phantom 4, provided by Sharjah Archaeology Authority.

During a day off, the team was asked to provide ortophotographic and 3D models of two structures in Mleiha – the Fort and the Farmhouse Complex – by using UAVs.
The same kind of products were also delivered, on the 29th November, by aerial mapping of Shark Island, in Khorfakkan.
MLEIHA
Both the Fort and Farmhouse complexes are covered. The Fort was covered at an altitude of 30m, with an overlap of 80%. Area covered was 6622m2. 2D Map resolution is 1.30cm/px.
The Farmhouse Complex was covered at an altitude of 10m, with an overlap of 80%. Area covered was 810m2. 2D Map resolution is 1cm/px.




SHARK ISLAND
Shark Island Archaeological Site 1 (SIAS1) was covered at an altitude of 18m, with an overlap of 80%. Area covered was 8400m2. 2D Map resolution is also 1cm/px.

Shark Island Site 2 (SIAS2) was covered at an altitude of 12m, with an overlap of 80%. Area covered: was 14.576m2. 2D Map resolution is 1cm/px.

Discussion
Archaeology aims at reconstructing the past from material remains left behind. We are a product of history and knowing the past helps us understand the present.
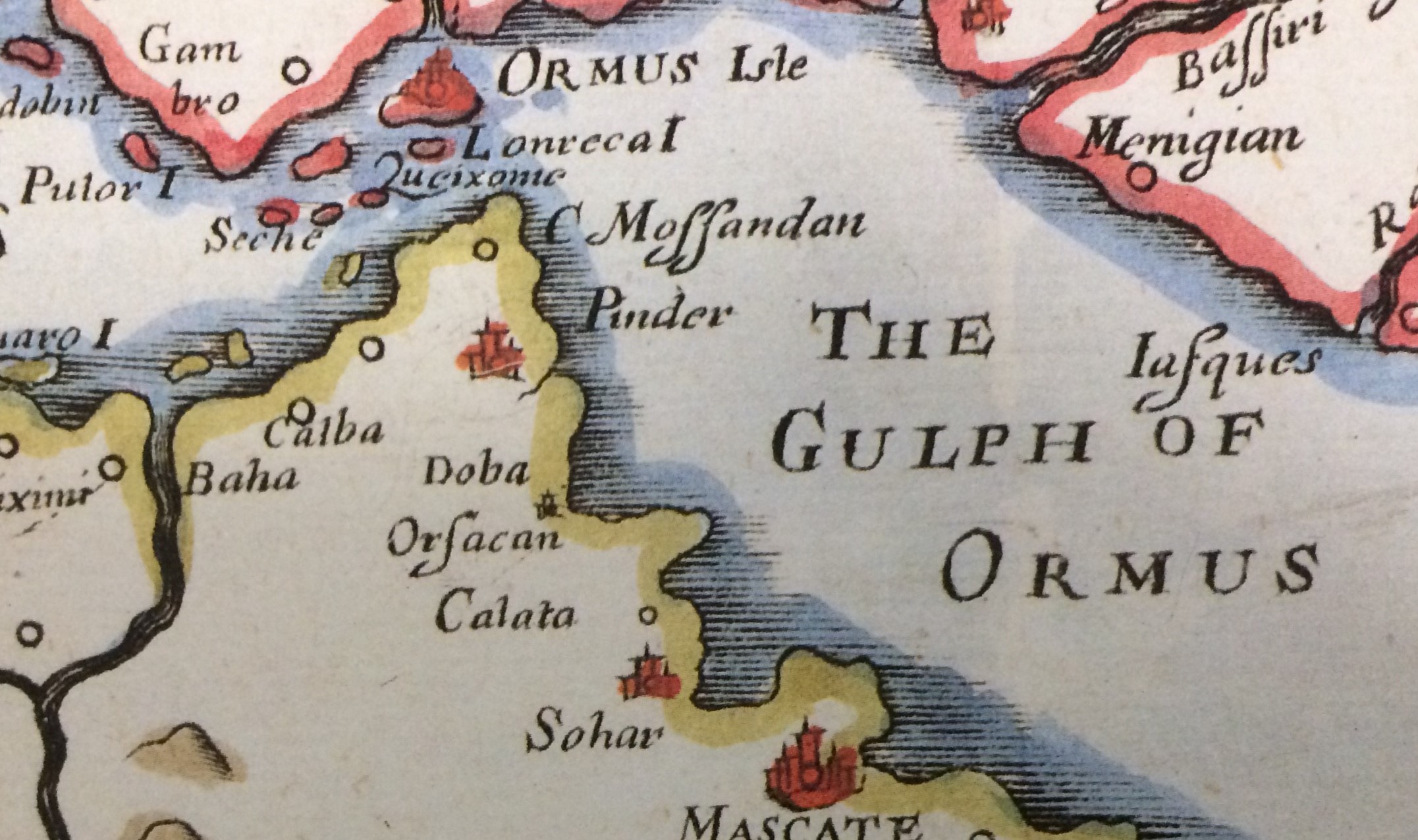
The seafaring history of the Oman Gulf goes back to the Neolithic and probably beyond, and archaeologists are naturally interested in the development of the many types of boats and ships that have been recorded there5.
To the watercraft developed in the region we must add those sailed into it, brought by the intense and cosmopolitan commerce that characterized the region since long.
Ships and boats have always been some of the most complex artefacts built by every society, and the diversity of functions, shapes, sizes, and construction methods known to have been built and sailed in the region is an interesting and important topic, which has not yet been studied in depth.
Over 4.000 years ago maritime trade in this region became well established and a wide range of goods were brought to this region from civilizations as far as the Hindustan, Mesopotamia or the Greek and Roman worlds via ports such as Tell Abraq, 30 km north of the actual Sharjah city – a port that also exported the copper mined and smelted in the Hajar mountains
Through its main ports, Tell Abraq and Dibba, trade with East Africa, Iran, China and India was conducted, the region exporting mainly pearls, dried fish and dates and importing gold, ivory, carved stone vessels, pottery, oils, grain and textiles. Later, local merchant captains, the nawkhda would voyage around the Gulf, across the Indian Ocean to India and down Africa’s east coast buying and selling in each port they visited and returning with a huge variety of goods from many different places.6
In the 16th century a relatively small number of Portuguese adventurers, merchants, and soldiers established a number of fortresses in the region that is now the Sharjah Emirate. The remains of that presence include some constructions on land, and possibly some submerged archaeological remains of ships and boats.
It is well known that the Portuguese seafarers brought ships from Portugal into the Oman Gulf, but that they also built some there, bought others around the region and even seized, and used, local watercraft.
An interesting question is what kind of transfer of knowledge occurred between Portuguese and local shipbuilders and what kind of changes it triggered in their shipbuilding practices.7
To know where the nautical knowledge resided and how it was transferred is an important part of the human history,8 and although there have been countless studies of the local and European shipbuilding histories, the nautical history of the region occupied today by the United Arab Emirates is still waiting to be written.9 Clues to it are shipwreck remains.
Some references to Portuguese shipwrecks in the Oman Gulf exist10 and one historical shipwreck was found so far, with a cache of artefacts dating to the early 16th century being found by treasure hunters near the island of Al Hallaniyah, Oman, in 1998, artefacts being recovered in 2013-2016 by both the Omani Ministry of Heritage and Culture and a private company named Blue Water Recoveries Ltd.
The ship’s anchors have not been located, and a large sand pocket near the salvaged area has not been trenched, so it is impossible to say much about this site. Historical records suggest that these materials can be part of the remains of one of Vicente Sodré’s ships lost at Al Hallaniyah in 1503.11
Also, a very large marine astrolabe in the Museum of Islamic Art, in Doha, Qatar, although it’s provenance is unknown at the moment, displays a pattern of corrosion consistent with an underwater origin and may have been recovered from a local shipwreck context.
There is no historical evidence pinpointing the occurrence of a Portuguese shipwreck in the areas around the Sharjah Portuguese fortresses, such as Khor Fakkan, although it is almost certain that the remains of anchorage areas exist to this day.
Items lost, discarded, or abandoned tend to be covered with sediment and preserved for centuries. Moreover, old ships and boats are often beached and abandoned around occupied areas and iconography of Portuguese settlements in the East frequently portray areas were ships and boats are built or repaired. As the coast has advanced around these fortresses it is likely that the old beaches today lie beneath more modern constructions or roads.12

The existence of modern harbours and marinas suggests that at least some archaeological remains may have been dredged and discarded. Such is, certainly, the case with Kalba, Khor Fakkan and Dibba al Hisn, where the then mooring areas have either been dredged or covered with piers and breakwaters. Finally, the beautiful and healthy coral reefs that populate the coast may have covered ship remains, making them very difficult to locate.
All these reasons do not prevent remains of seafaring activity, connected or not to the Portuguese 16th and 17th centuries presence in the region, or even older ones, dating back to the Bronze Age, from being found.
Water is a good medium to preserve organic remains and technology – namely marine robotics – is evolving at an extremely fast pace as is immersive technologies that can increase exploration time in an underwater archaeological site, both for the public, as well as, for researchers and scholars, raising their archaeological knowledge and cultural awareness.13
The discovery of Dibba’s sunken speedboat and Khor Fakkan ship-to-shore remains demonstrated that, if not silted over or covered by corals or hidden beneath breakwaters, shipwreck sites, no matter how small they are, can be found, dived and researched.
For this to happen it is recommended that:
- a UAE shipwreck database must be built over the DBA results being compiled right now by this team;
- Priority for remote sensing surveys must be given to the coastal shelf and slope areas for approaches to harbours, shipping channels and anywhere near navigational hazards, such as sunken rocks, reefs and small islands;
- Identified landscape areas based on where high concentrations of UCH are likely to occur must require higher resolution mapping for discovery of UCH. This entails more time spent on smaller areas;
- Fishermen and local divers must be engaged in further projects of this
References
Agius, Dionisius, 2005. Seafaring in the Arabian Gulf and Oman: People of the Dhow. New York: Routhledge.
Agius, Dionisius, 2008. Classic Ships of Islam: From Mesopotamia to the Indian Ocean. Leiden: Brill.
Al-Qasimi, Sultan Bin Muhammad. 1999. The Gulf in Historic Maps 1478 – 1861, 2nd edition. London: Streamline Press Ltd.
Al-Qasimi, Sultan Bin Muhammad. 2013 Power Struggles and Trade in the Gulf 1620 – 1820. AlQasimi Publications.
Carter, R., 2002. “The Neolithic origins of seafaring in the Arabian Gulf”. Archaeology International, 6, pp. 44–47.
Carter, R., 2006. “Boat remains and maritime trade in the Persian Gulf during the sixth and fifth millennia BC”. Antiquity, 80(307), 52-63.
Castro, F.; Bendig, C.; Bérubé, M.; Borrero, R.; Budsberg, N.; Dostal, C.; Monteiro, A.; Smith, C.; Torres, R. & Yamafune, K. 2017. “Recording, Publishing, and Reconstructing Wooden Shipwrecks”, in Journal of Maritime Archaeology, April 2018, Volume 13, Issue 1, pp 55–66.
Chellapermal, C.; Murphy, N.; Christensen, M.; Russel, K.; Atkinson, K.; Sockett, J.; Harris, C. & Schroder, T. (2014) UAE Diving. 4th edition. Dubai: Explorer Group Ltd.
Liarokapis, F.; Kouřil, P.; Agrafiotis; P.; Demesticha, S.; Chmelík, J. & Skarlatos, D. 2017. “3D Modelling and Mapping for Virtual Exploration of Underwater Archaeology Assets”, in The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume XLII-2/W3, 2017 3D Virtual Reconstruction and Visualization of Complex Architectures, 1–3 March 2017, Nafplio, Greece, pp. 425-431.
Mearns, D., Parham, D., Frohlich, B., 2016. “A Portuguese East Indiaman from the 1502-1503 Fleet of Vasco da Gama off Al Hallaniyah Island, Oman: an interim report.” International Journal of Nautical Archaeology, 45.2: 331-350.
Monteiro, Alexandre 2016. “Naus and galleons in Arabia Felix- Portuguese nautical archaeology in Oman.” In Actas das Jornadas do Mar 2016. Lisboa: Escola Naval / Marinha Portuguesa, pp. 304- 317.
Overlaet, Bruno 2018 “Cost effective drones in archaeological surveying: possible Musallah on the Jebel Fayah near Mleiha, Sharjah, UAE”. in Annual Sharjah Archaeology #15. Sharjah: Sharjah Archaeology Authority 2nd edition, pp. 90-95.
Philips, Carl & Jasinski, Marek 2018. “The Norwegian Expeditions for underwater excavations”, in
Annual Sharjah Archaeology #13. Sharjah: Sharjah Archaeology Authority 2nd edition, pp. 7-12.
Urbanos, J., 2016. “Is it the Esmeralda?” Archaeology Magazine (July/August 2016).
Villiers, A., 1969. Sons of Sinbad: an account of sailing with the Arabs in their dhows, in the Red Sea, around the coasts of Arabia, and to Zanzibar and Tanganyika; pearling in the Persian Gulf; and the life of the shipmasters, the mariners, and merchants of Kuwait. New York: Scribner.