
Underwater Systems and Technology Laboratory
Introduction
José Pinto and Marina Oliveira
Development of Tools and Technologies for the Deployment of Networked Vehicle Systems.
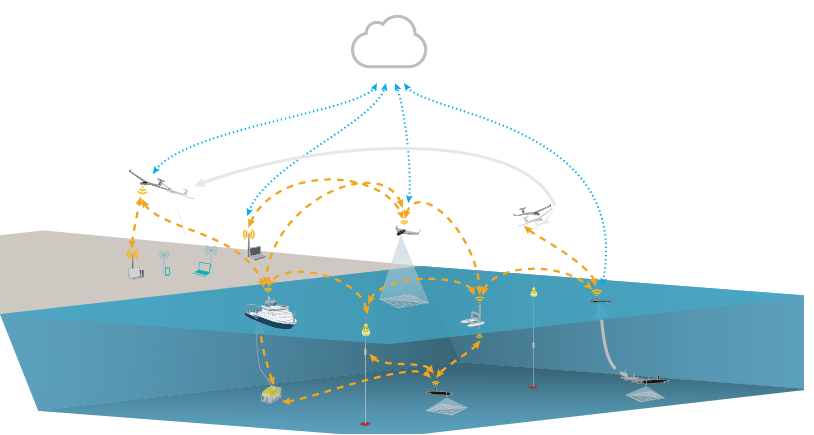
The LSTS is specialized on the design, construction, and operation of unmanned underwater, surface and air vehicles and on the development of tools and technologies for the deployment of networked vehicle systems.
In the last 20 years researchers from the LSTS have successfully fielded unmanned air, ground, surface and underwater vehicles in the Atlantic and Pacific oceans, and also in the Mediterranean sea. These vehicle systems implement the LSTS control architecture with the help of the LSTS Neptus-IMC-Dune software toolchain. Neptus is a distributed command, control, communications and intelligence framework for operations with networked vehicles, systems, and human operators. IMC is a communications protocol that defines a common control message set understood by all types of LSTS nodes. DUNE is the system for vehicle on-board software. It is used to write generic embedded software at the heart of the vehicle, e.g. code for control, navigation, or to access sensors and actuators. It provides an operating-system and architecture independent C++ programming environment for writing efficient real-time reactive tasks in modular fashion. The toolchain has support for Disruptive Tolerant Network (DTN) protocols.